- 240
- 产品价格:20000.00 元/套 起
- 发货地址:浙江台州温岭市 包装说明:不限
- 产品数量:9999.00 套产品规格:不限
- 信息编号:262504759公司编号:23123428
- 赵经理 微信 137365773..
- 进入店铺 在线咨询 QQ咨询 在线询价
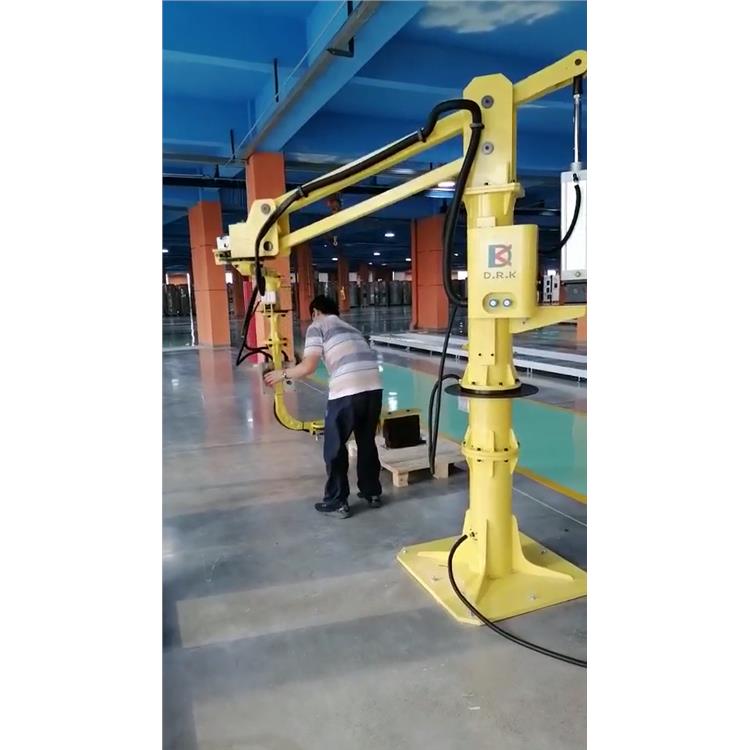
凝聚共识 西安助力机械手 西安助力机械臂 西安平衡吊 杭州悬臂吊
- 相关产品:
臂长:2m(可定制)提升重量:10kg-500kg高度:3m可定制驱动方式:电动/驱动安装方式:单梁/双梁
雅铭研发生产:硬臂式/软索式/T型轨道式助力机械手/气动平衡吊/电动平衡吊/真空吸吊机/悬臂吊/折臂吊/KBK轨道
服务于北京, 天津, 石家庄, 廊坊, 太原, 沈阳, 长春, 南京, 浙江, 杭州, 湖州, 嘉兴, 金华, 丽水, 宁波, 衢州, 绍兴, 台州, 温州, 舟山, 合肥, 芜湖, 福州, 泉州, 厦门, 南昌, 山东, 济南, 青岛, 郑州, 武汉, 长沙, 重庆, 成都, 西安地区
在对助力机械手装置平衡性能的调试校正工作阶段,不管进行空载情况下的平衡性能调试校正或者是进行负载情况下的平衡性能调试校正,助力机械手装置一般均应该调整到短的等效力臂区域条件。而当处于空载状态的情况,利用空载的气体控制压力调节阀对信号的气体压力进行调整配置,可以让气缸端以及负载端都位于受力的均衡条件。而在处于负载状态的情况时,可以利用负载气体控制压力调节阀装置对信号气体压力进行调整配置,可以让具有重物的负载端以及气缸端保持在受力平衡条件。
助力机械手移载系统通常由移动及滑行部分、助力机械手主机本体、夹具、供气系统和气路控制系统几部分组成
安装固定气动助力机械手时,必须先调整水平导向槽的水平度,不水平度不得**过0.025/100毫米。
助力机械手负载时,手动操作的推拉力一般为3-5公斤。如果规定操作的推拉力很小,相反,物体会产生惯性,影响助力机械手的稳定性,所以要有克服惯性的力,所以在设计过程中要注意在平衡臂的各个关节处给予适当的摩擦力。
气动平衡助力机械手,桁架机械手产品已广泛应用于汽车、电子、电气、家电、内衣服饰、生物医疗、五金、化妆品、航空航天、包装等行业,为企业解决劳动力成本、提、提升效率提供完整的自动化生产解决方案。
联系手机是13736577326, 主要经营雅铭自动化设备有限公司位于市东南工业区。台州雅铭自动化流水线秉承专注,专研的精神,已经拥有一套完整的管理制度和现代化生产经验,还具有一批专门从事物流流水线研究、开发的技术人员,使流水线产品结构合理,更能节省能源和提高生产效力。公司主要服务台州地区,雅铭—专职服务于流水线,自动化流水线,自动化生产线设计,研发 ,生产,制造。。
单位注册资金未知。
{kind=link}